It might sound like a belated April Fool but Honda’s latest idea for rider-assist technology is no joke – it’s a jump control system for off-road and adventure bikes that takes some of the jeopardy out of jumping.
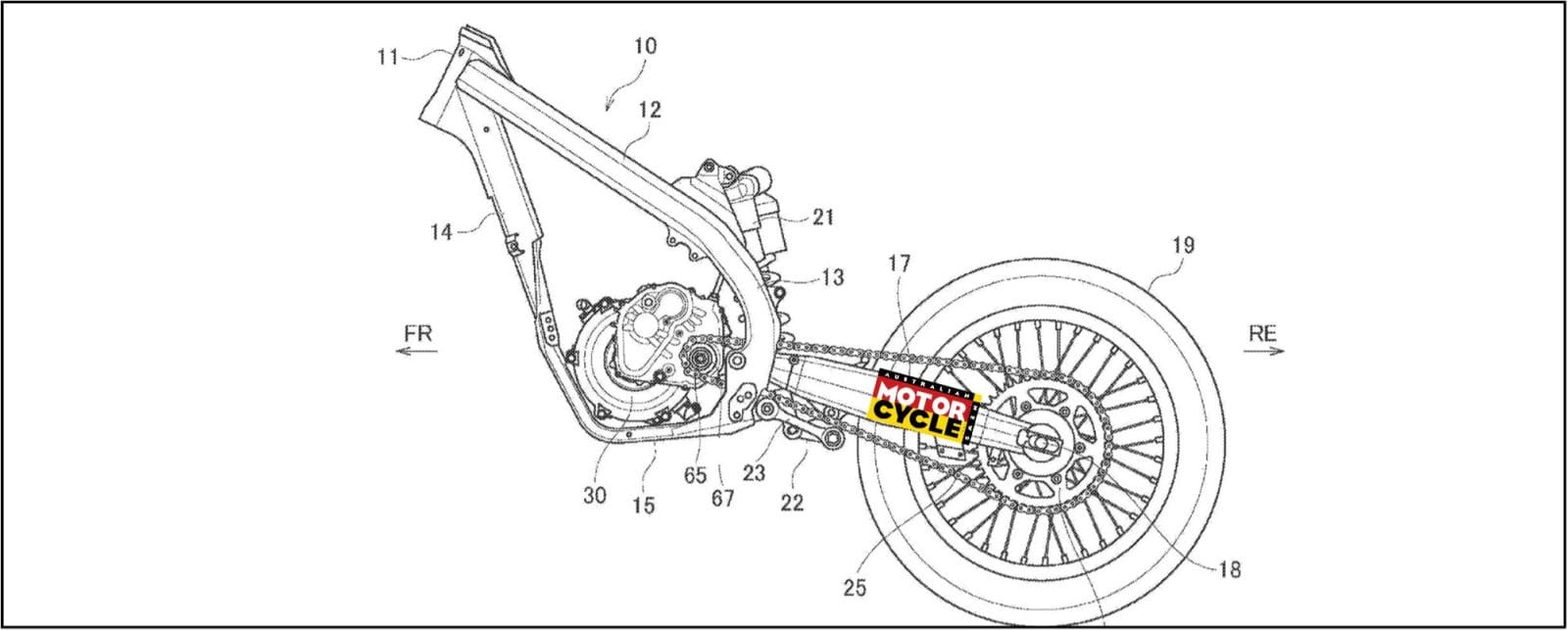
The system has emerged in a new patent application from Honda, a clear indication that it’s something that’s not only under development but something that’s serious enough to warrant the not inconsiderable expense of trying to gain patent protection on. The patent document uses a CRF450 Rally for its main illustration, which is a good indicator of the sort of bike that could benefit most from the idea; a Dakar-oriented rally-raid machine that could spend hours leaping from dune to dune with an increasingly weary rider on board.
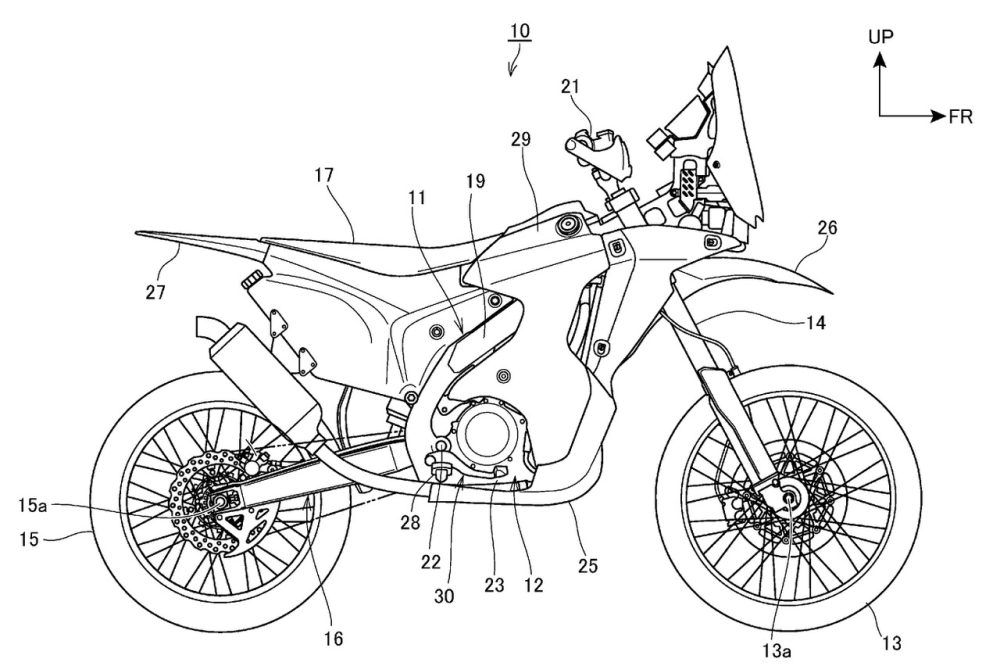
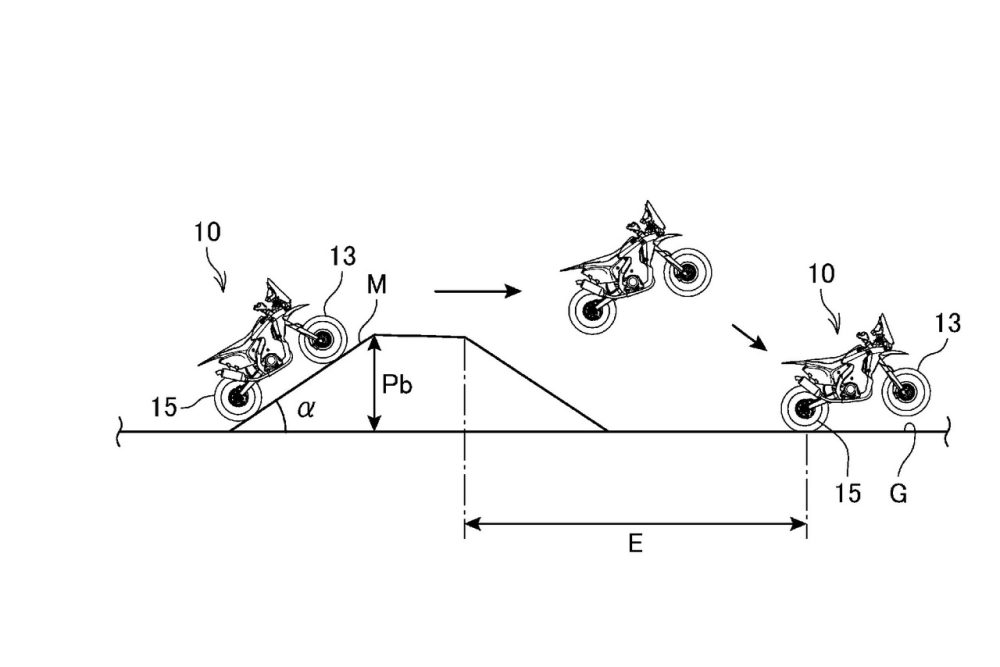
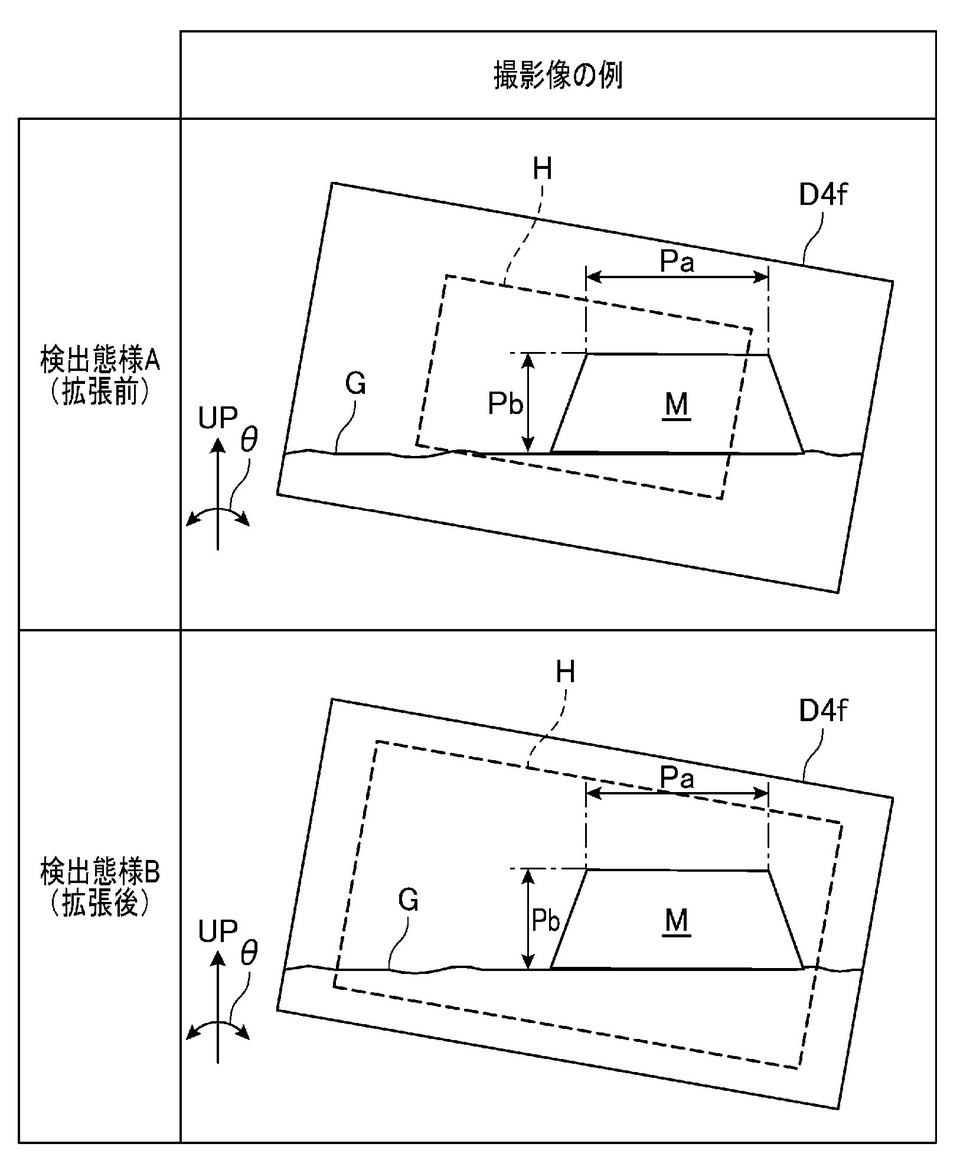
The jump assist system itself is based largely on existing technology like an inertial measurement unit and lean sensors to monitor the bike’s orientation but adds a front-facing camera to the mix. As you approach a slope, the camera feeds an image of it back to the computer, allowing it to judge how steep it is and whether the bike’s likely to leave the ground when you reach the top.
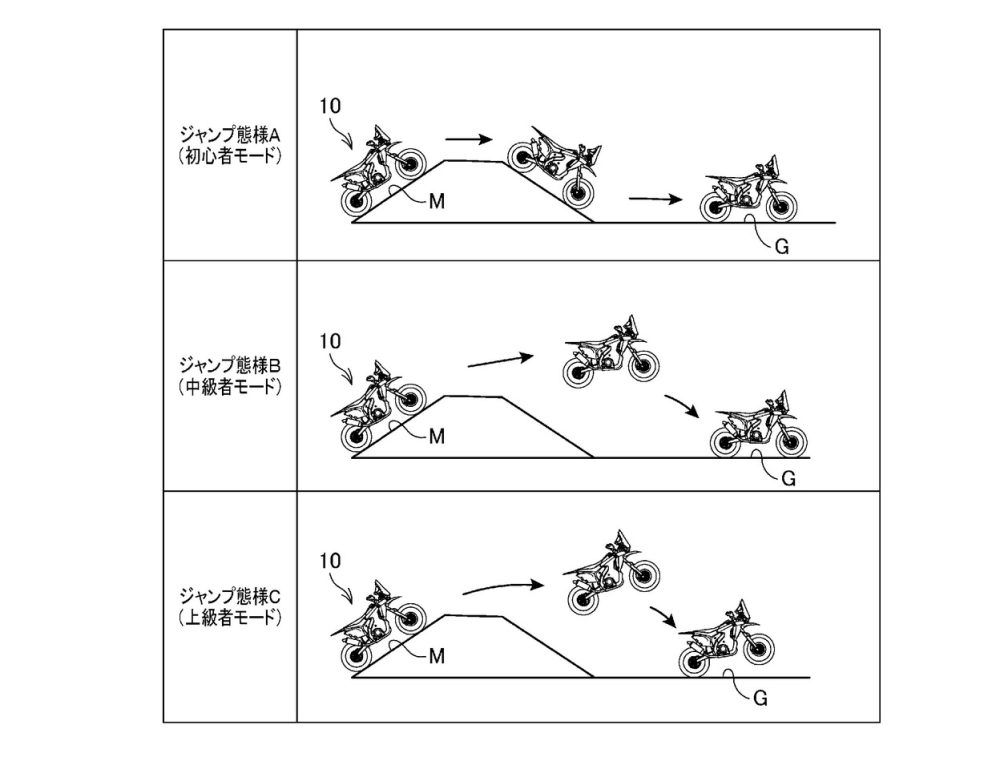
How it reacts then depends on the setting you’ve chosen. The most moderate ‘Jump mode A’ setting is intended to completely prevent jumps, so as you near the top of the slope it will cut the bike’s power and reduce its speed in an effort to keep the wheels on the ground. Front and rear wheel speed sensors as well as suspension stroke sensors are used to judge whether the bike is still in contact with terra firma. If the suspension goes to full extension and the front and rear wheel speeds start to differ significantly, then the system knows you’re aloft.
In its middle ‘Jump mode B’ setting, the system aims to allow the bike to jump, but will still modulate the throttle and speed to make sure the airborne distance isn’t too far. Honda’s patent suggests the jump distance for each mode could be set separately to suit each rider’s preference. The middle setting also controls the throttle and rear brake when the bike is in the air to maintain a relatively horizontal attitude, aiming for a two-wheeled landing.
In the top ‘Jump mode C’ setting, the jump system allows longer leaps and the control system uses the rear brake and throttle to adopt a more nose-up position in the air, targeting a rear-wheel landing. Adding more throttle to increase the rear wheel speed while airborne will tend to lift the front, while a dab of rear brake pulls the nose down.
Of course, completely disabling the system will allow the rider to have full control, as on a conventional bike.
Given that many of today’s street bikes already have launch control, wheelie control and traction control, and even slide control systems are starting to be introduced to production bikes, jump control for off-road machines seems like a logical extension.
Ben Purvis