It has been almost 30 years since the dawn of a project that, in only slightly different circumstances, might have led to a very different type of motorcycle being in common use today.
Back in the early 1990s, Swedish suspension firm Öhlins was convinced that two-wheel-drive promised a motorcycling revolution away from the rear-wheel drive paradigm and began work on a system that came closer than you might have thought to reaching mass production.
Its 2WD technology eventually saw off-road racing success and even reached production in the short-lived Yamaha WR450F 2-Trac, but below that visible surface was a much larger project that envisioned bikes of all types, from scooters to superbikes, driven by both wheels.
The Öhlins 2WD research project was green-lit for a feasibility study in 1992 and became a 15-year crusade to bring power to both ends of bikes, with dozens of prototypes made to explore the idea. Now, almost a decade after the project was shelved in 2007, we’ve got pictures of some of the most interesting 2WD designs penned by brilliant engineers.
In the context of the early 1990s, 2WD made a lot of sense. At the time, four-wheel drive was all the rage in the car world, around a decade after Audi’s Quattro brought it to mainstream attention, dominating the World Rally Championship. Carmakers globally were engineering 4WD systems to fit everything from sub-1000cc minicars like the Subaru Justy to supercars such as the Bugatti EB110. It was an engineering advance that was also proving to be a massive marketing tool, so it’s little surprise that several bike manufacturers started looking at the idea.
But putting power to the front wheel of a bike isn’t straightforward. Öhlins wasn’t the first to attempt it – you’d been able to buy a 2WD Rokon Ranger since the 1960s – but finding a way to drive a wheel that steers, without compromising the suspension or adding too much weight or bulk, was key to making it a success.
Systems using shafts, chains or a combination of the two have been made to work, but Öhlins’ suspension experience meant it was more familiar than most with the potential of hydraulics. Forcing an incompressible fluid (like oil) down flexible tubes from an engine-driven pump to a small, hub-mounted hydraulic motor was appealing as it meant a system could be engineered that would fit conventional bikes without redesigning their suspension or transmissions. That’s exactly what Öhlins did.
2WD on the road
In late 2001 grainy pictures first emerged of a Yamaha R1 fitted with the Öhlins 2WD set-up, but that wasn’t its first attempt at translating the technology to the road.
A year earlier, in 2000, Öhlins built a prototype – internally named Goofy – that must be one of the most prescient machines ever created. It combined the chassis and engine of an R1 with high, wide ’bars and TDM850-style bodywork. The result was a superbike-powered machine with a riding position and styling that these days would be put on the road-going edge of the ‘adventure’ class, just like BMW’s S1000XR.
And just like the S1000XR and a host of other modern, high-powered, adventure-styled bikes that are really intended for road use, it took on that style to emphasise its abilities as an all-weather all-rounder that could harness a sportsbike’s power and let normal riders exploit it on real-world roads.
The R1 that followed was a testbed to see whether the system could provide benefits on the track as well.
The results of these tests were both conclusive and favourable. As you’d expect, the 2WD roadbikes offered better traction – particularly in the wet – when compared to their one-wheel-drive brethren. The 2WD system also made them more predictable on corner entry and allowed them to hold a tighter line, as well as letting riders get on the throttle sooner.
If that wasn’t conclusive enough, a side-effect of the system was that as speeds rose a greater proportion of the torque went to the front wheel, aiding straight-line stability at high speed, particularly in the wet.
Dyno testing with a 50hp test bike accelerating at full throttle showed that up to about 45km/h only 10 per cent of the torque went to the front wheel, but the percentage rose until, at around 175km/h, there was an even torque split between the two ends. Above that speed, the front wheel actually transmitted more of the torque than the rear.
On higher-powered bikes like the R1 prototype, the rear wheel remained dominant (since the hydraulic pump and motor were limited to a maximum power of about 25kW), but testing still showed improved stability, and the fact that the front wheel was driven had a side-effect of making wheelies more controllable and easier to land.
The R1 was by no means Öhlins’ last road-oriented 2WD prototype. Despite being largely owned by Yamaha at the time, it created a 2WD KTM LC4 supermoto, which in 2003 allowed it to test the system’s behaviour when sliding on asphalt.
The following year, a second-generation 2WD superbike was created. Again, the firm opted not to use a Yamaha but to try the set-up on a Ducati 998.
Finally, in 2005, an Aprilia Caponord was fitted with the same set-up, perhaps giving the best clue as to how the system might have been used today given the exponential growth of the adventure bike market in the past decade. Unfortunately, that bike coincided with the tailing-off of the 2WD project.


How it works
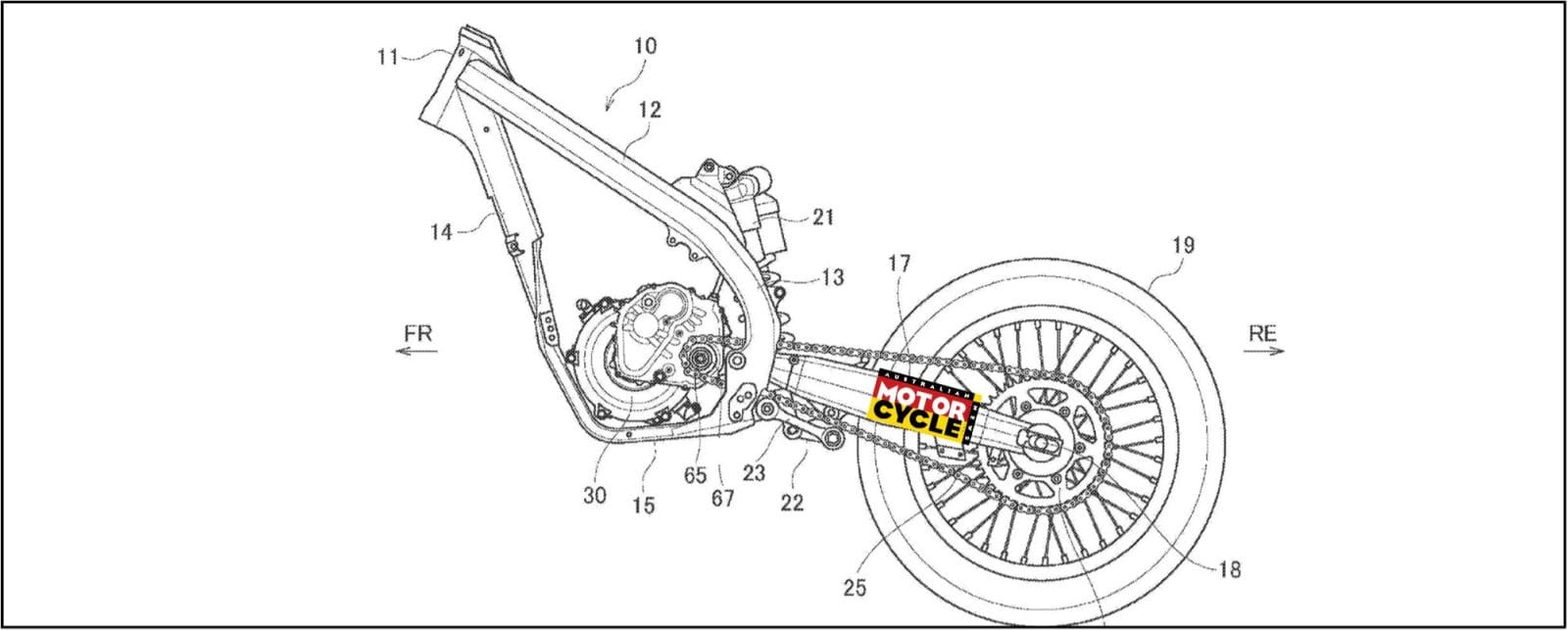
Both the hydraulic pump and motor in the Öhlins system were essentially identical, based on existing fixed-displacement, bent-axis hydraulic pump technology.
Drive was taken from the front sprocket by bolting a short jackshaft to it. Another sprocket on the other end of this shaft drove a short chain to a second, smaller sprocket attached to the pump – gearing it up in relation to the front sprocket’s speed.
The pump itself was an A2FO5, built by Bosch subsidiary Rexroth. It used seven tiny pistons with ball-joints at the bottom ends of the piston shafts. These were mounted on a circular drive flange, and the pistons slid into a barrel like the cylinder of a revolver. The barrel, with the pistons inside individual cylinders machined into it, rotated along with the drive flange but was mounted at an angle of about 30o, so that, as the whole assembly spun, the pistons rose and fell in their tiny cylinders. A fixed-position plate machined with intake and outlet ports allowed the movement of the pistons to pump oil through the hydraulic system.
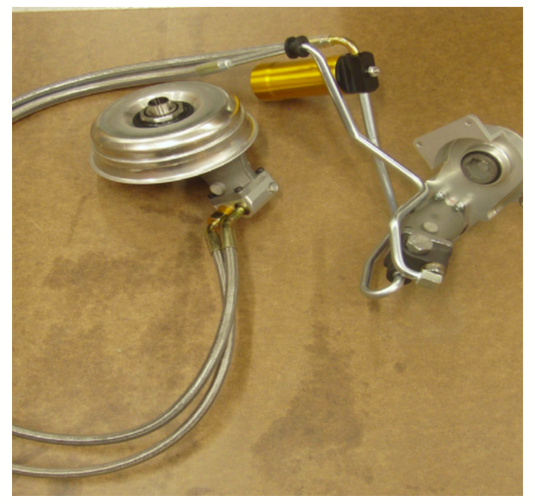
From the pump, a high-pressure hydraulic hose took fluid to the front wheel at 320 bar of pressure, driving a motor attached to the hub. The motor (a Rexroth A2FM5) was virtually identical to the pump, but operated in reverse – the oil was forced into the cylinders, making the pistons move and in turn rotating the motor. A low-pressure line took the fluid back to the pump again.
For some prototypes, a pressure chamber looking just like the remote reservoir of a rear shock was added to the high-pressure line to ensure a constant fluid pressure.
In its 1990s racing form, the Öhlins system weighed 6.6kg and could transmit 22kW to the front wheel. Later production versions, as used on the WR450F 2-Trac, took 25kW to the wheel and added 8.6kg to the bike’s overall weight.
In operation, the amount of power and torque going to the front wheel depended on the amount of slip at the rear wheel. Even in normal use, there’s a small amount of slip at the back, so there’s always some torque transmitted to the front. But when the rear, which still receives most of the torque and power, starts to spin, much more goes to the front creating a self-modulating system.
The Flaws
there was no denying the impressive results for 2WD. The prototype sportsbikes using the system were claimed to lap significantly faster than their conventional counterparts, particularly in the wet, but the system wasn’t without flaws.
Firstly, some power was lost to the system’s additional internal friction. While that might have reduced a bike’s performance in some situations, Öhlins reckoned that the prototypes’ ability to put their power down better than a conventional bike more than made up for it.
The system could also create increased steering forces, giving an unnatural feel, and could make the fork ‘lock up’ on occasion. This was something that Öhlins intended to address with a second-generation system under development when the project started to wind down. It added a control valve that effectively turned the front wheel’s drive on or off depending on whether it was needed. As on many modern cars, this automated ‘on demand’ set-up could have addressed issues with fuel consumption, drag and ‘feel’ without losing the benefit of a driven front wheel when it was needed.
Öhlins also had plans to develop a system capable of transmitting more power to the front wheel, which would have been particularly useful on high-performance machines, and was working on a cheaper design that might have been useful on scooters and low-powered bikes. The project ended before these ideas were developed.
None of these issues were, in themselves, terminal flaws. Problems that were harder to solve included the additional cost of the hydraulic drive. The system may have been relatively simple, but it required precision manufacturing that was expensive to achieve. Honda later had a similar issue with its short-lived DN-01 (remember that?), which used a clever variable-speed hydraulic drive to power the rear wheel instead of a shaft, belt or chain. It worked, but was hard to make and led to high manufacturing costs.
Tyre manufacturers would also need to be on side to develop tyres to maximise the potential of two-wheel drive.
However, perhaps the biggest problem faced by Öhlins was its timing. When development started in the 1990s, splitting drive between the wheels appeared the best way to maximise a bike’s ability to use the ever-growing amount of power on offer, but by the mid-2000s electronic traction control was on the rise and we’d started to see a revolution in tyre technology.
When the project started, riding gods struggled to tame 135kW GP bikes on slick tyres and few roadbikes offered as much as 100kW; now you can buy road-going machines with 150kW that even an amateur can happily ride on the street thanks to incredible tyres and electronics. A precision-engineered 2WD system will always add more weight and cost than the handful of sensors and microchips needed for traction control, and its advantage was fast eroded to almost nothing.

Would the Öhlins system, with another decade of development under its belt, make a convincing case today? It’s impossible to know, but the fact that 2016’s MotoGP bikes have been sprouting wings to help keep the front wheel on the ground, and wheelspin is barely an issue, suggests that the system’s niche – at least in terms of tarmac machines – might have largely disappeared thanks to improvements in technology elsewhere.
At the end of the day, Öhlins developed its system as far as possible by the time it was mothballed in 2007. The 2WD prototypes have been scattered to the winds; most were made for their manufacturers and returned to them, with the exception of one of the R1s, which remains in Öhlins’ hands.
Had any of those manufacturers decided the system was vital to their future machines, they could have asked for more development to be done. None did. That’s not necessarily a criticism of the system itself, though. Had one firm made the leap, it could easily have resulted in many following suit. Remember that until 2009 you couldn’t buy a sportsbike with ABS brakes, but once Honda introduced it on that year’s Fireblade and CBR600RR, it became must-have technology within months, with rivals scrabbling to catch up.

The Future
Öhlins may not be working on 2WD any longer, but the idea still pops up on occasion. American firm Christini builds a purely mechanical, shaft-and-chain system for motocross, enduro and supermoto bikes that can be retro-fitted as a kit and has proved moderately successful.
It could be that the coming revolution in electric power finally triggers a mass movement to 2WD. Lightweight in-hub motors and the fact you only need a couple of wires to feed them rather than precision hydraulics or complex shafts, could make it easy to add front-drive to virtually any bike.

German firm Wunderlich revealed a prototype two-wheel-drive BMW R1200 GS in late 2015 using just such an electric drive system for its front wheel, and KTM has filed patents for something similar. Yamaha – one of the key players in the Öhlins project – has also seen the possibilities, last year revealing an electric 2WD sportsbike concept in the form of its PES2, intended to go into production in the near future. Even the military has an interest, with work underway on an electric 2WD enduro for US Commandos.
Want a 2WD bike right now? As well as the Christini option, there’s the New Zealand-made Ubco 2×2, an electric utility bike that powers both wheels, while Rokon – maker of 2WD bikes since the 1960s – will still sell you one, having recently added front suspension for the first time.
If you want to try the Öhlins system for yourself, you can search out one of the tiny number of Yamaha WR450F 2-Trac machines sold in 2004 and 2005. Only 445 were made, though, so prepare yourself for a long search.

WORDS & PHOTOGRAPHY BEN PURVIS